1.前言
高精度电子地图也称为高分辨率地图(HD Map,High Definition Map),是一种专门为无人驾驶服务的地图。与传统导航地图不同的是,高精度地图除了能提供的道路(Road)级别的导航信息外,还能够提供车道(Lane)级别的导航信息。无论是在信息的丰富度还是信息的精度方面,都是远远高于传统导航地图的。 目前市面上提供高精度地图的厂商有:tomtom、here、百度、高德等。 高精度地图流行的格式有很多种,有的厂商直接基于rndf地图增加属性来制作高精度地图,也有厂商使用osm格式增加属性来制作高精度地图。 对于ADAS系统,则有ADASIS定义了地图的数据模型及传输方式,以CAN作为传输通道。 OpenDRIVE是一种开放的文件格式, 用于路网的逻辑描述,常用于高精度地图的制作,百度Apollo则使用基于OpenDRIVE格式改进过的高精度地图。
本文主要对OpenDRIVE文件格式进行简述,详情可参考:http://www.opendrive.org/docs/OpenDRIVEFormatSpecDelta_1.5M_vs_1.4H.pdf。
2.正文
OpenDRIVE文件格式为XML,该XML文件种包含了很多地图信息,如Road、Junction、station等。

主要结构如下:
OpenDRIVE
|-header
| |-geoReference
| |-offset
|-road
| |-link
| | |-predecessor
| | |-successor
| | |-neighbor
| |-type
| | |-speed
| |-planView
| | |-geometry | | | |-line
| | | |-spiral
| | | |-arc
| | | |-poly3
| | | |-paramPoly3
| |-elevationProfile
| | |-elevation
| |-lateralProfile
| | |-superelevation
| | |-crossfall
| | |-shape
| |-lanes
| | |-laneOffset
| | |-laneSection
| | | |-left
| | | | |-lane
| | | | | |-link
| | | | | | |-predecessor
| | | | | | |-successor
| | | | | |-width
| | | | | |-border
| | | | | |-roadMark
| | | | | | | -sway
| | | | | | | -type
| | | | | | | | -line
| | | | | | | -explicit
| | | | | | | | -line
| | | | | |-material
| | | | | |-visibility
| | | | | |-speed
| | | | | |-access
| | | | | |-height
| | | | | |-rule
| | | |-center
| | | | |-lane
| | | | | |-link
| | | | | | |-predecessor
| | | | | | |-successor
| | | | | | |-predecessor
| | | | | | |-successor
| | | | | |-roadMark
| | | | | | | -sway
| | | | | | | -type
| | | | | | | | -line
| | | | | | | -explicit
| | | | | | | | -line
| | | |-right
| | | | |-lane
| | | | | |-link
| | | | | | |-predecessor
| | | | | | |-successor
| | | | | |-width
| | | | | |-border
| | | | | |-roadMark
| | | | | | | -sway
| | | | | | | -type
| | | | | | | | -line
| | | | | | | -explicit
| | | | | | | | -line
| | | | | |-material
| | | | | |-visibility
| | | | | |-speed
| | | | | |-access
| | | | | |-height
| | | | | |-rule
| |-objects
| | |-object
| | | |-repeat
| | | |-outlines
| | | | |-outline
| | | | | |-cornerRoad
| | | | | |-cornerLocal
| | | |-material
| | | |-validity
| | | |-parkingSpace
| | | |-markings
| | | | |-marking
| | | | | |-cornerReference
| | | |-borders
| | | | |-border
| | | | | |-cornerReference
| | |-objectReference
| | | |-validity | | |-tunnel
| | | |-validity | | |-bridge
| | | |-validity
| |-signals
| | |-signal
| | | |-validity
| | | |-dependency
| | | |-reference
| | | |-positionRoad
| | | |-positionInertial
| | |-signalReference
| | | |-validity
| |-surface
| | |-CRG
| |-railroad
| | |-switch
| | | |-mainTrack
| | | |-sideTrack
| | | |-partner
|-controller
| |-control
|-junction
| |-connection
| | |-predecessor
| | |-successor
| | |-laneLink | |-priority
| |-controller
| |-surface
| | |-CRG
|-junctionGroup
| |-junctionReference
|-station
| |-platform
| | |-segment
A.坐标系
最先考虑的应该时坐标系的表达方式,在GIS中一般使用两种常用的坐标系类型:
- 全局坐标系或球坐标系,例如经纬度。这些坐标系通常称为地理坐标系。(GCS)
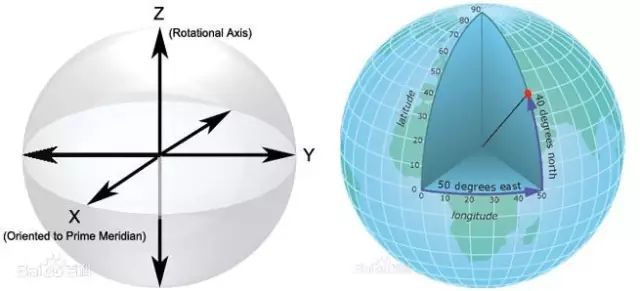
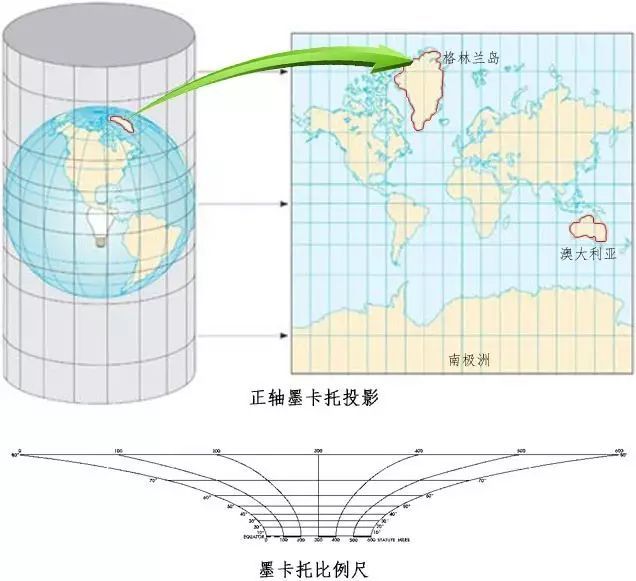
- 基于横轴墨卡托、亚尔勃斯等积或罗宾森等地图投影的投影坐标系,这些地图投影(以及其他多种地图投影模型)提供了各种机制将地球球面的地图投影到二维笛卡尔坐标平面上。(PCS)
在OpenDRIVE中可表示为:
<geoReference>
<![CDATA[+proj=utm +zone=32 +ellps=WGS84 +datum=WGS84 +units= m+no_defs]]>
</geoReference>
从OpenDRIVE 1.4 开始, 可以使用格式化为 “proj4”-字符串的投影定义对路网进行地理参照转化. PROJ 是一种通用坐标变换软件, 它将地理空间坐标从一个坐标参考系统 (CRS) 转换为另一个坐标参考系统。这包括制图投影和大地测量转换。 geoReference元素定义了该文件使用的投影坐标系,其中地理坐标系为WGS-84。
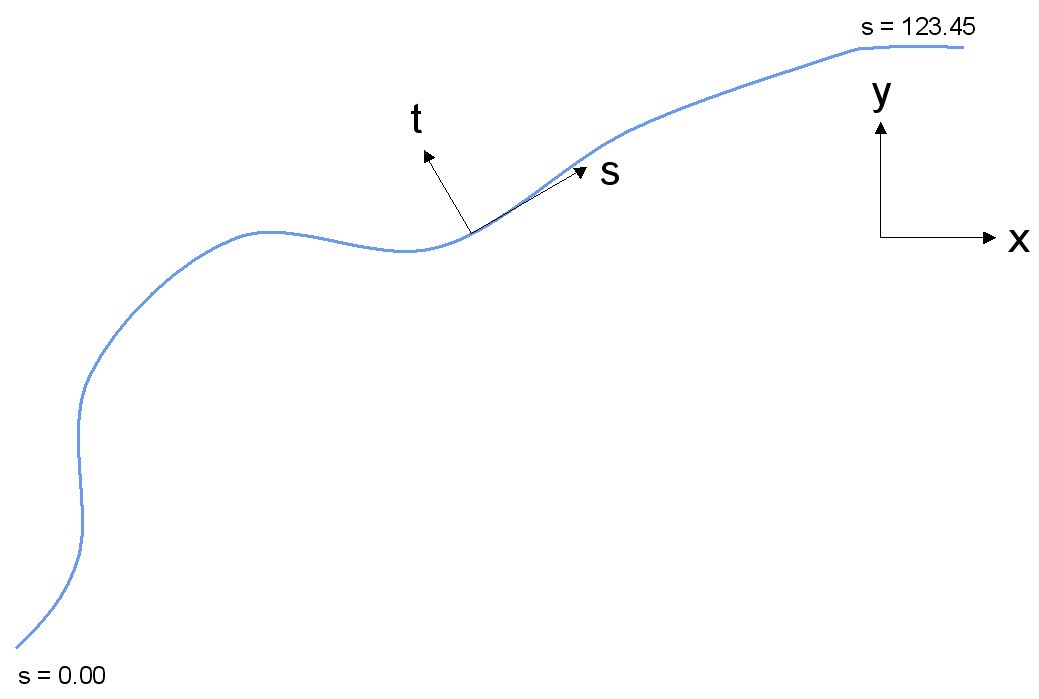
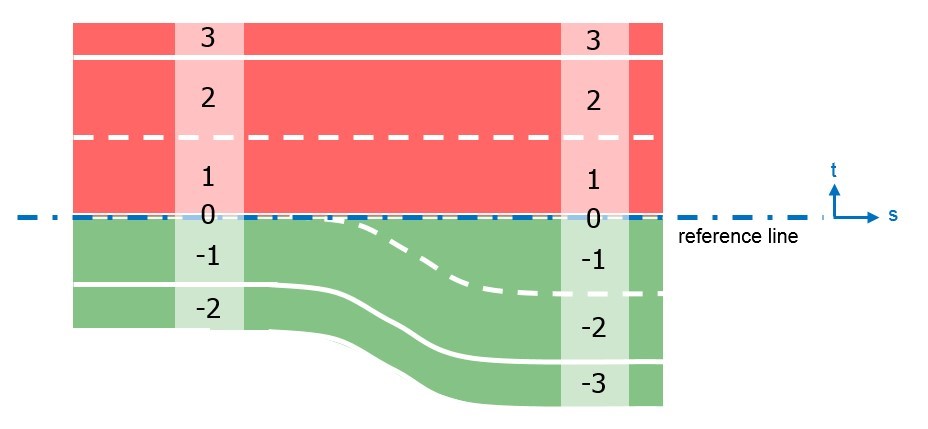
在OpenDRIVE数据中大量使用的位置信息都是投影后的xy坐标,而除了该投影坐标系,还定义了一种轨迹坐标系,如下所示,s坐标是沿着reference line的,关于reference line后面介绍,长度是在xy坐标下计算的。
t坐标,是相对于reference line的侧向位置,左正,右负。
B.Road Layout
OpenDRIVE中路网结构中的一个road,该road有三部分组成,蓝色的reference line,车道lane,车道lane的其他feature(限速等)。
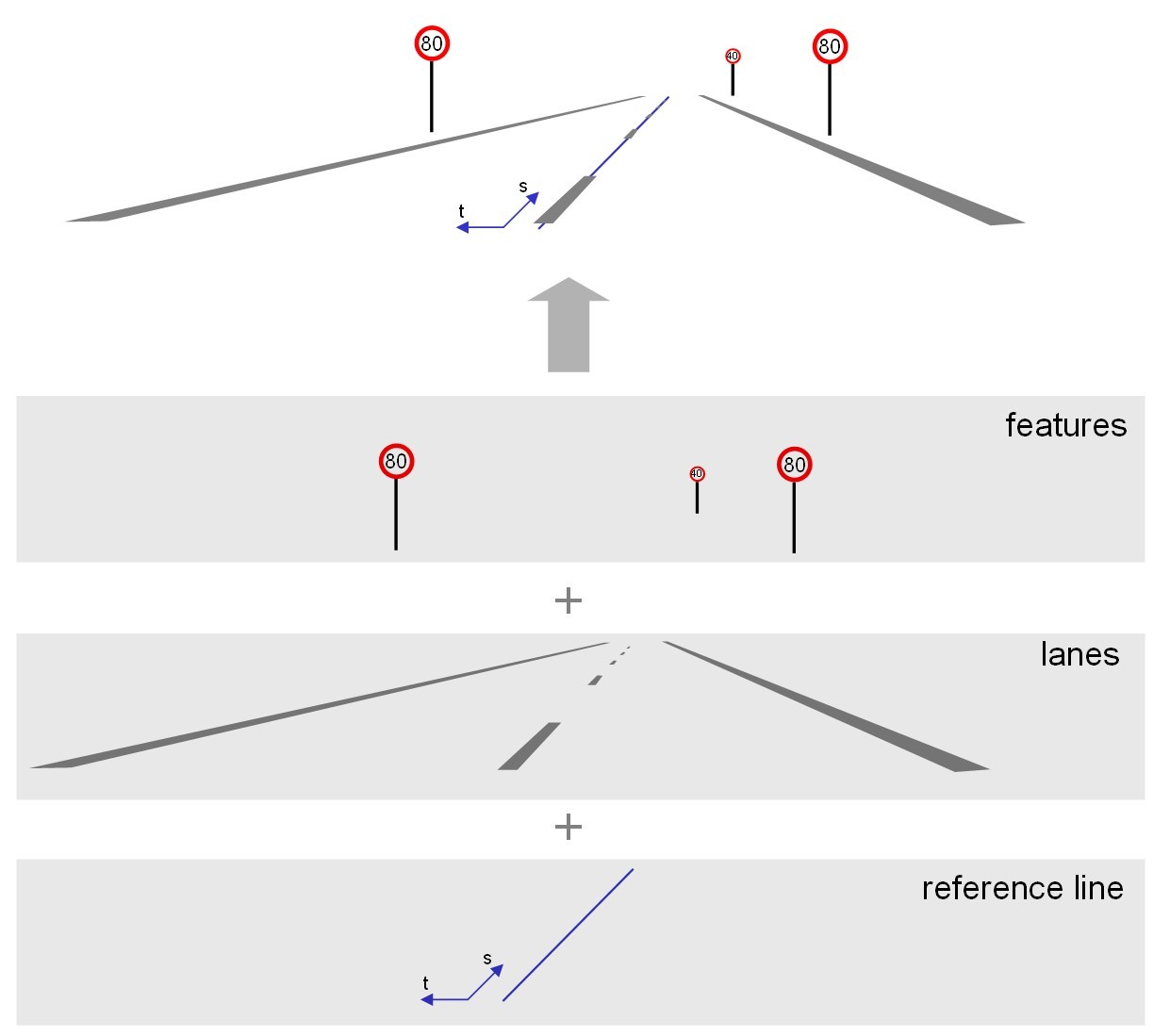
所有道路都由一条参照线组成, 用于定义基本几何 (弧线、直线等)。沿着参考线, 可以定义道路的各种属性。这些是, 例如海拔概况、车道、交通标志等。道路可以直接连接 (当两个给定的道路之间只有一个连接时), 也可以通过路口 (当从某一道路到其他道路有一个以上的连接时)。
所有属性都可以根据本规范中规定的标准进行参数化, 也可以通过用户定义的数据进行参数化。
C.Reference Line
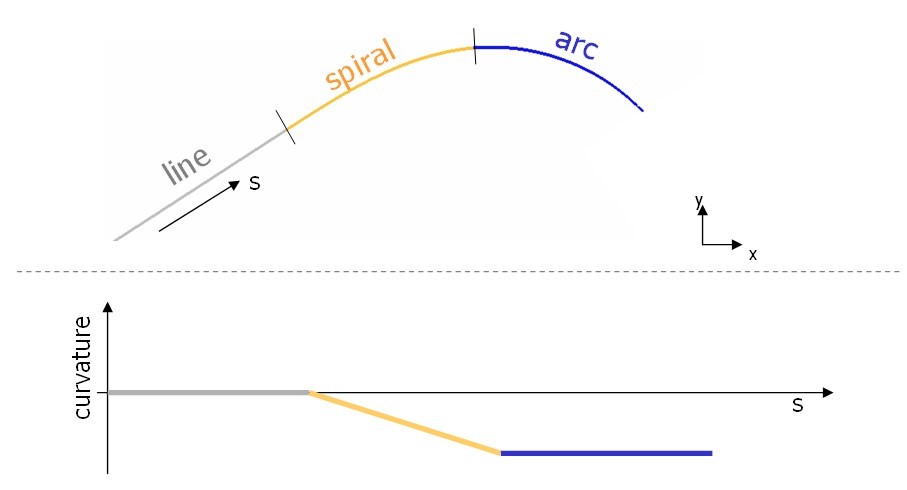
整个地图路网由很多的road构成,而每个road中都会包含reference line,就是一条线,它没有宽度。 reference line,线条有好几种类型,直线,螺旋线等, The geometry of the reference line is described as a sequence of primitives of various types. The available primitives are:
straight line (constant zero curvature) spiral (linear change of curvature) curve (constant non-zero curvature along run-length) cubic polynom parametric cubic curves
下图为几种常见的reference line,注意图中的两个坐标系,xy和st
D.Lane
车道是由数字识别的, 这些数字是唯一的 (每个车道部分, 见下文) - 顺序 (即没有缝隙), - 从参考线上的0开始 - 向左上升 (正 t 方向) - 向右下降 (负 t 方向)
车道总数不受限制。参考线本身被定义为车道零, 不能有宽度条目 (即其宽度必须始终为 0.0)。
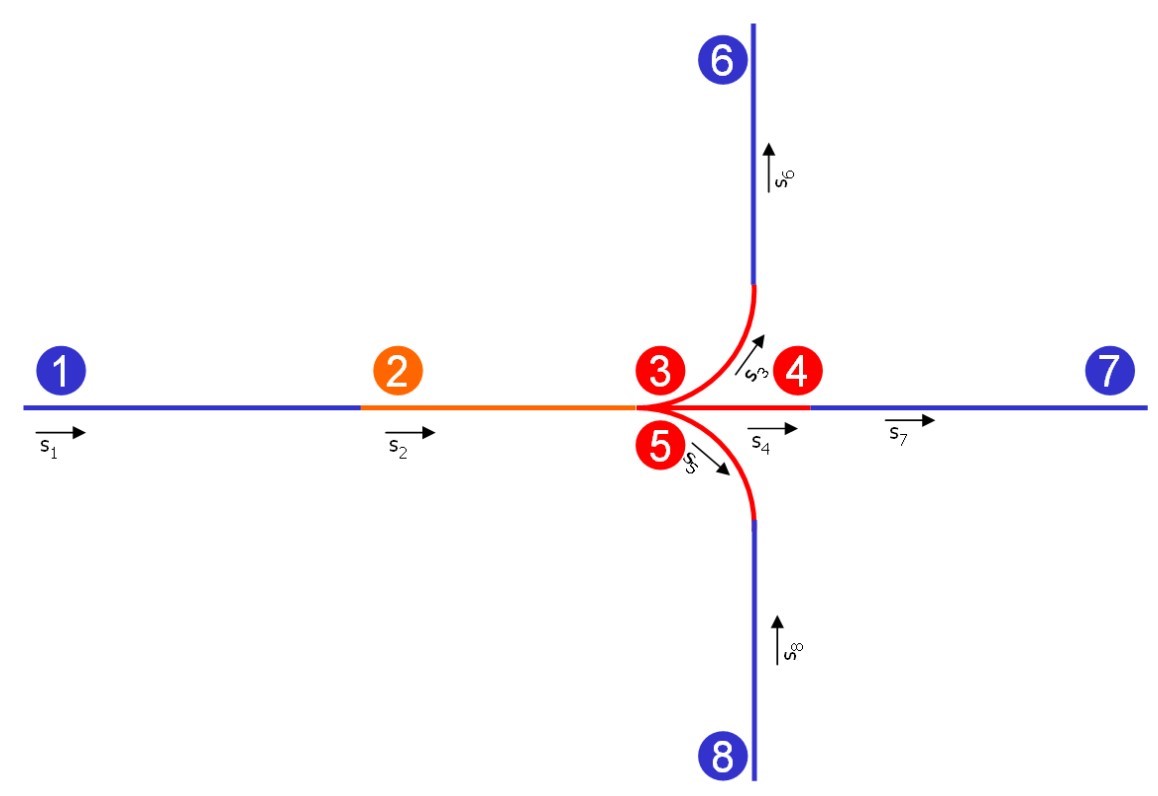
E.Road Linkage
road之间的连接定义了两种(每个road有唯一的ID),一种是有明确的连接关系,例如前后只有一条road,那么通过 successor/predecessor进行连接(例如下图中的road 1和road 2)。
3.总结
总之,对于一个road来说,先确定reference line,有了reference line的几何形状和位置,然后再确定reference line左右的车道lane,车道lane又有实线和虚线等属性;road 和road之间通过普通连接和Junction进行连接,同时还要将road中的相关车道进行连接。